教练技术 业绩稳健增长+多维度突破,老板电器三季度将开启新的增长空间 2025年10月29日,老板电器发布的第三季度财报引人注目。在复杂的市场环境下,交出了一份亮眼的答卷。... 9天前 71℃ 评论 0 喜欢
培训故事 三季报丨兰州银行:前三季度利息净收入增长2.19%,净利润微增0.63% 10月30日,兰州银行发布2025年第三季度报告,该行在公告中表示,将加强资产负债管理,努力改善负债规模。... 2025-11-01 184℃ 评论 0 喜欢
教练技术 第三季度报告|江苏银行:前三季度收入增长7.83% 净利润增长8.32% 10月30日,江苏银行发布2025年第三季度报告。前三季度,该行实现营业利润671.83亿元,同比。... 2025-11-01 51℃ 评论 0 喜欢
其它 夜拉苏河,水流汇聚静安!城市滨水区拉锯战愈演愈烈 夜晚的苏州河边,阵阵呐喊声、欢呼声亮了起来。 10月28日至30日,2025上海国际运动潮流文化节将分七大板块举行... 2025-11-01 103℃ 评论 0 喜欢
每日一贴 三季报丨邮储银行:前三季度收入增长1.82%,净利润增长1.07% 10月30日,邮储银行发布2025年第三季度报告,该行实现收入856.34亿元,同比增长2.48%;... 2025-11-01 183℃ 评论 0 喜欢
每日一贴 “三个三千亿”再创新台阶 嘉定“十四五”跑出现代化新城“嘉东速度” 10月22日,市政府新闻办召开上海“十四五”规划第九次新闻发布会,“努力交出新的答卷”。... 2025-10-23 98℃ 评论 0 喜欢
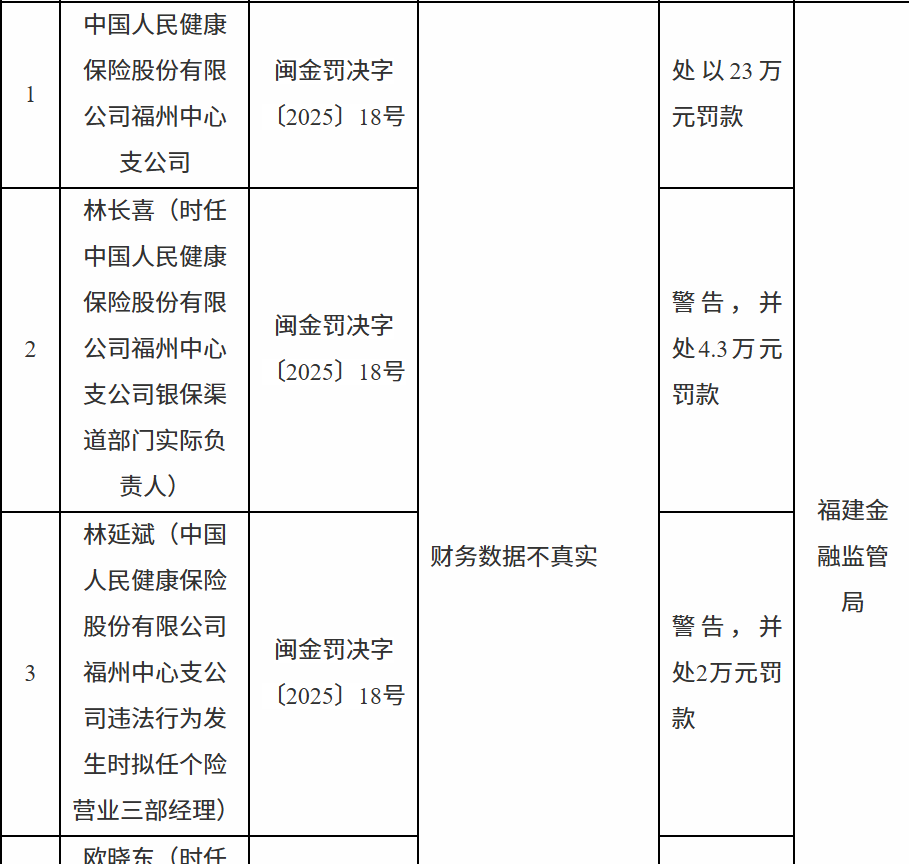
每日一贴 人保健康福州分公司因财务数据虚假被罚款23万元,三名责任人合计被指控7.3万元。 10月21日,福建省金融监管局行政处罚信息公开表显示,中国人民健康保险股份有限公司福州中心支公司... 2025-10-22 107℃ 评论 0 喜欢
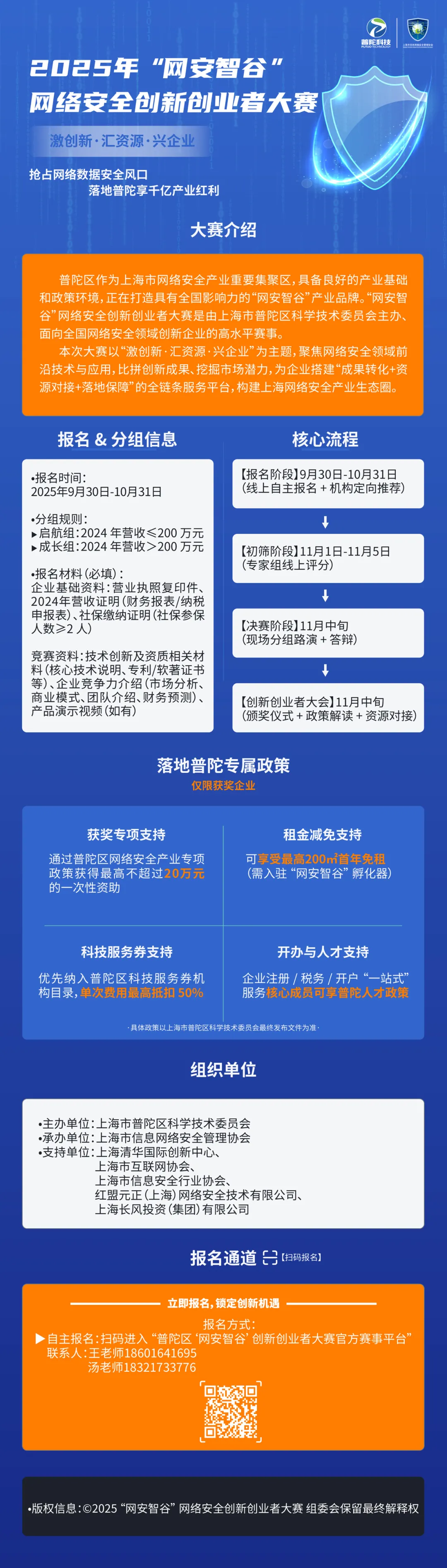
培训故事 【活动】2025“网络安全智谷”网络安全创新创业大赛全新启动 如果你是一家拥有重大技术的初创公司,或者是一家寻求成功的成长型公司,只要你有网络安全变革的梦想和创业精神,你就想在行业中掀起波澜。... 2025-10-13 64℃ 评论 0 喜欢